HowdyHack is a 24-hour, beginner-friendly hackathon where students from Texas A&M University compete by brainstorming, building, hacking, then submitting their product to a panel of judges to potentially win a variety of prizes.
Jordan DeShan, Lauren Kerno and Stefanus Komala-Noor from multidisciplinary engineering technology and Dawson Brown from electronic systems engineering technology won second place in the hackathon for their work on Bitwise Boogie, the dancing robot.

After an hour of brainstorming, Brown and Komala-Noor contributed to the robot's frame by sketching designs and determining the type of frame they wanted. DeShan and Kerno focused on software design and inverse kinematics to determine the motion the robot should take to reach each desired position.
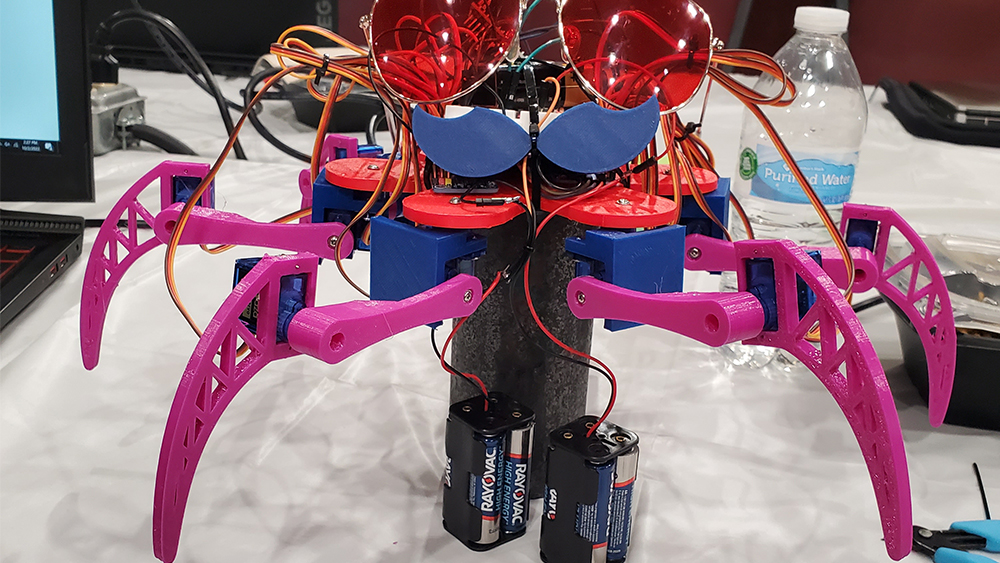
"We knew we wanted to build a robot because robots stand out at hackathons. So, we expanded that to a hexapod, a six-legged robot," DeShan said. "I had most of the electronics at my house, where we built the robot, and we substituted with scrap for the rest of the parts we needed but didn't have."
"Everybody in our group enjoys getting together and making new things, especially with robotics and programming,” Brown said. “The HowdyHack was predominantly a software hackathon. So, we were happy to have been able to place with the hardware project. The hackathon was a fun opportunity to gain experience and challenge ourselves by making something. We were only given 24 hours from start to finish to conceptualize, design and build our project."
Beyond hacking, HowdyHack is about connecting Aggies with other creative and talented engineers. It's an opportunity for hackers to share their skills and capabilities with fellow hackers to share insights and learn new skills.
"This was an educational experience. Our main goal was to learn and apply something new about the software and hardware we had on hand," Brown said. "We looked around the room, grabbed what we could and made something out of it."
The future of Bitwise Boogie is to refine the inverse kinematics to perform complex movements and operations, such as exploring dangerous environments with unparalleled mobility, going where wheeled robots or drones cannot and executing autonomous missions on a predetermined schedule or with the push of a button.